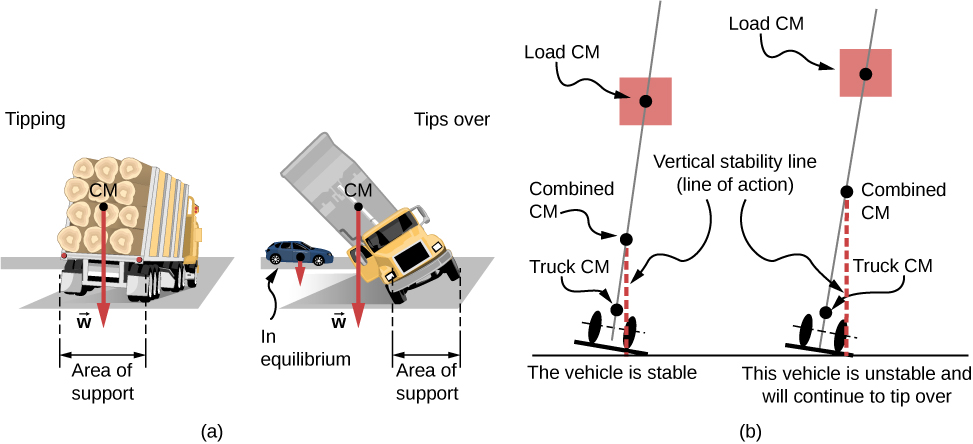
The distribution of mass affects the position of the center of mass (CM), where the weight vector
is attached. If the center of gravity is within the area of support, the truck returns to its initial position after tipping [see the left panel in (b)]. But if the center of gravity lies outside the area of support, the truck turns over [see the right panel in (b)]. Both vehicles in (b) are out of equilibrium. Notice that the car in (a) is in equilibrium: The low location of its center of gravity makes it hard to tip over.
If you tilt a box so that one edge remains in contact with the table beneath it, then one edge of the base of support becomes a pivot. As long as the center of gravity of the box remains over the base of support, gravitational torque rotates the box back toward its original position of stable equilibrium. When the center of gravity moves outside of the base of support, gravitational torque rotates the box in the opposite direction, and the box rolls over. View this
demonstration to experiment with stable and unstable positions of a box.
Center of gravity of a car
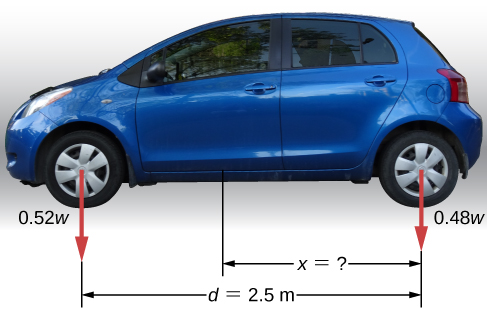
A passenger car with a 2.5-m wheelbase has 52% of its weight on the front wheels on level ground, as illustrated in
[link] . Where is the CM of this car located with respect to the rear axle?
The weight distribution between the axles of a car. Where is the center of gravity located?
Strategy
We do not know the weight
w of the car. All we know is that when the car rests on a level surface, 0.52
w pushes down on the surface at contact points of the front wheels and 0.48
w pushes down on the surface at contact points of the rear wheels. Also, the contact points are separated from each other by the distance
At these contact points, the car experiences normal reaction forces with magnitudes
and
on the front and rear axles, respectively. We also know that the car is an example of a rigid body in equilibrium whose entire weight
w acts at its CM. The CM is located somewhere between the points where the normal reaction forces act, somewhere at a distance
x from the point where
acts. Our task is to find
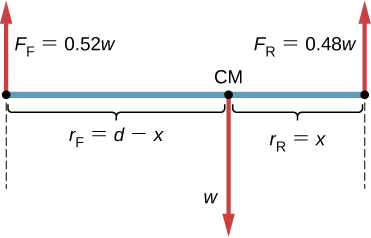
x . Thus, we identify three forces acting on the body (the car), and we can draw a free-body diagram for the extended rigid body, as shown in
[link] .
The free-body diagram for the car clearly indicates force vectors acting on the car and distances to the center of mass (CM). When CM is selected as the pivot point, these distances are lever arms of normal reaction forces. Notice that vector magnitudes and lever arms do not need to be drawn to scale, but all quantities of relevance must be clearly labeled.
We are almost ready to write down equilibrium conditions
[link] through
[link] for the car, but first we must decide on the reference frame. Suppose we choose the
x -axis along the length of the car, the
y -axis vertical, and the
z -axis perpendicular to this
xy -plane. With this choice we only need to write
[link] and
[link] because all the
y -components are identically zero. Now we need to decide on the location of the pivot point. We can choose any point as the location of the axis of rotation (
z -axis). Suppose we place the axis of rotation at CM, as indicated in the free-body diagram for the car. At this point, we are ready to write the equilibrium conditions for the car.